- 您現在的位置:買賣IC網 > PDF目錄373996 > ADM1066ACP-REEL (ANALOG DEVICES INC) Multisupply Supervisor/Sequencer with Margining Control and Auxiliary ADC Inputs PDF資料下載
參數資料
| 型號: | ADM1066ACP-REEL |
| 廠商: | ANALOG DEVICES INC |
| 元件分類: | 電源管理 |
| 英文描述: | Multisupply Supervisor/Sequencer with Margining Control and Auxiliary ADC Inputs |
| 中文描述: | 10-CHANNEL POWER SUPPLY SUPPORT CKT, QCC40 |
| 封裝: | 6 X 6 MM, MO-220VJJD-2, LFCSP-40 |
| 文件頁數: | 26/32頁 |
| 文件大小: | 861K |
| 代理商: | ADM1066ACP-REEL |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁當前第26頁第27頁第28頁第29頁第30頁第31頁第32頁
ADM1066
The device also has several identification registers (read-only),
which can be read across the SMBus. Table 10 lists these registers
with their values and functions.
Table 10. Identification Register Values and Functions
Name
Address
Value
MANID
0xF4
0x41
Rev. 0 | Page 26 of 32
Function
Manufacturer ID for Analog
Devices
Silicon revision
S/w brand
S/w brand
REVID
MARK1
MARK2
0xF5
0xF6
0xF7
0x00
0x00
0x00
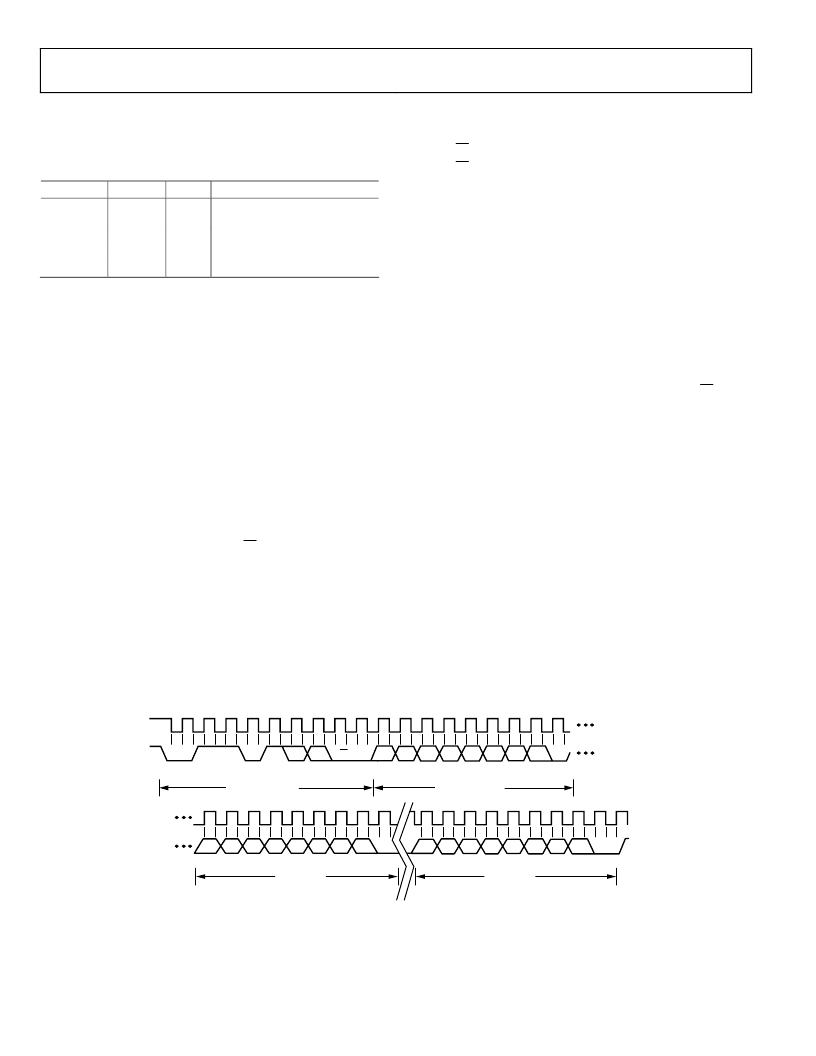
General SMBus Timing
Figure 36, Figure 37, and Figure 38 are timing diagrams for
general read and write operations using the SMBus. The SMBus
specification defines specific conditions for different types of
read and write operations, which are discussed in the Write
Operations and Read Operations sections.
The general SMBus protocol operates as follows:
1.
The master initiates data transfer by establishing a start
condition, defined as a high-to-low transition on the serial
data-line SDA, while the serial clock-line SCL remains
high. This indicates that a data stream follows. All slave
peripherals connected to the serial bus respond to the start
condition and shift in the next 8 bits, consisting of a 7-bit
slave address (MSB first) plus a R/W bit. This bit deter-
mines the direction of the data transfer, that is, whether
data is written to or read from the slave device (0 = write,
1 = read).
The peripheral whose address corresponds to the transmit-
ted address responds by pulling the data line low during
the low period before the ninth clock pulse, known as the
acknowledge bit, and holding it low during the high period
of this clock pulse.
All other devices on the bus remain idle while the selected
device waits for data to be read from or written to it. If the
R/W bit is a 0, the master writes to the slave device. If the
R/W bit is a 1, the master reads from the slave device.
2.
Data is sent over the serial bus in sequences of nine clock
pulses, eight bits of data followed by an acknowledge bit
from the slave device. Data transitions on the data line
must occur during the low period of the clock signal and
remain stable during the high period, because a low-to-
high transition when the clock is high might be interpreted
as a stop signal. If the operation is a write operation, the
first data byte after the slave address is a command byte.
This tells the slave device what to expect next. It might be
an instruction telling the slave device to expect a block
write, or it might simply be a register address that tells the
slave where subsequent data is to be written. Because data
can flow in only one direction, as defined by the R/W bit,
sending a command to a slave device during a read
operation is not possible. Before a read operation, it might
be necessary to perform a write operation to tell the slave
what sort of read operation to expect and/or the address
from which data is to be read.
3.
When all data bytes have been read or written, stop condi-
tions are established. In write mode, the master pulls the
data line high during the 10th clock pulse to assert a stop
condition. In read mode, the master device releases the
SDA line during the low period before the ninth clock
pulse, but the slave device does not pull it low. This is
known as no acknowledge. The master then takes the data
line low during the low period before the tenth clock pulse,
then high during the tenth clock pulse to assert a stop
condition.
0
1
9
9
1
1
9
1
9
START BY
MASTER
ACK. BY
SLAVE
ACK. BY
SLAVE
ACK. BY
SLAVE
ACK. BY
SLAVE
FRAME 2
COMMAND CODE
FRAME 1
SLAVE ADDRESS
FRAME N
DATA BYTE
FRAME 3
DATA BYTE
SCL
SDA
R/W
STOP
BY
MASTER
SCL
(CONTINUED)
SDA
(CONTINUED)
D7
A0
A1
1
1
1
0
0
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
D7
D6
D5
D4
D3
D2
D1
D0
Figure 36. General SMBus Write Timing Diagram
相關PDF資料 |
PDF描述 |
|---|---|
| ADM1066ACP-REEL7 | Multisupply Supervisor/Sequencer with Margining Control and Auxiliary ADC Inputs |
| ADM1066ACP-U3 | Multisupply Supervisor/Sequencer with Margining Control and Auxiliary ADC Inputs |
| ADM1066 | Multisupply Supervisor/Sequencer with Margining Control and Auxiliary ADC Inputs |
| ADM1066ASU | Multisupply Supervisor/Sequencer with Margining Control and Auxiliary ADC Inputs |
| ADM1069 | SUPER SEQUENCER-TM WITH MARGINING CONTROL AND AUXILIARY ADC INPUTS |
相關代理商/技術參數 |
參數描述 |
|---|---|
| ADM1066ACP-REEL7 | 制造商:Analog Devices 功能描述:Volt Supervisor Sequencer 2.7V to 5.4V 40-Pin LFCSP EP T/R |
| ADM1066ACP-U3 | 制造商:Analog Devices 功能描述:MULTI- SUPPLY SUPERVISOR/SEQUENCER WITH MARGINING CONTROL - Bulk |
| ADM1066ACPZ | 功能描述:IC SEQUENCER/SUPERVISOR 40LFCSP RoHS:是 類別:集成電路 (IC) >> PMIC - 監控器 系列:Super Sequencer® 其它有關文件:STM6717 View All Specifications 標準包裝:1 系列:- 類型:多壓監控器 監視電壓數目:2 輸出:開路漏極或開路集電極 復位:低有效 復位超時:最小為 600 ms 電壓 - 閥值:1.11V,3.075V 工作溫度:-40°C ~ 85°C 安裝類型:表面貼裝 封裝/外殼:SC-74A,SOT-753 供應商設備封裝:SOT-23-5 包裝:Digi-Reel® 產品目錄頁面:1194 (CN2011-ZH PDF) 其它名稱:497-7019-6 |
| ADM1066ACPZ-REEL | 功能描述:IC SEQUENCER/SUPERVISOR 40LFCSP RoHS:是 類別:集成電路 (IC) >> PMIC - 監控器 系列:Super Sequencer® 標準包裝:1 系列:- 類型:簡單復位/加電復位 監視電壓數目:1 輸出:開路漏極或開路集電極 復位:高有效 復位超時:- 電壓 - 閥值:1.8V 工作溫度:-40°C ~ 125°C 安裝類型:表面貼裝 封裝/外殼:6-TSOP(0.059",1.50mm 寬)5 引線 供應商設備封裝:5-TSOP 包裝:剪切帶 (CT) 其它名稱:NCP301HSN18T1GOSCT |
| ADM1066ACPZ-REEL7 | 功能描述:IC SEQUENCER/SUPERVISOR 40LFCSP RoHS:是 類別:集成電路 (IC) >> PMIC - 監控器 系列:Super Sequencer® 標準包裝:1 系列:- 類型:簡單復位/加電復位 監視電壓數目:1 輸出:開路漏極或開路集電極 復位:高有效 復位超時:- 電壓 - 閥值:1.8V 工作溫度:-40°C ~ 125°C 安裝類型:表面貼裝 封裝/外殼:6-TSOP(0.059",1.50mm 寬)5 引線 供應商設備封裝:5-TSOP 包裝:剪切帶 (CT) 其它名稱:NCP301HSN18T1GOSCT |
發布緊急采購,3分鐘左右您將得到回復。