- 您現在的位置:買賣IC網 > PDF目錄371053 > MC68HC16Z1 (Motorola, Inc.) 16-Bit Modular Microcontroller(16位模塊化微控制器) PDF資料下載
參數資料
| 型號: | MC68HC16Z1 |
| 廠商: | Motorola, Inc. |
| 英文描述: | 16-Bit Modular Microcontroller(16位模塊化微控制器) |
| 中文描述: | 16位微控制器模塊(16位模塊化微控制器) |
| 文件頁數: | 6/20頁 |
| 文件大?。?/td> | 210K |
| 代理商: | MC68HC16Z1 |
MOTOROLA
6
AN1213/D
To mitigate encoder velocity quantization noise, the derivative function is followed by an “n-point averager”,
which averages velocity information over a range of samples to provide finer resolution. However, this crude
low-pass filter also introduces phase lag proportional to
by the differentiator. To balance these two constraints,
coder resolution per sampling interval. The derivative stage transfer function is :
n
n
that counteracts the desired phase lead generated
is set equal to two, which effectively doubles en-
(EQ 5)
Figure 5
in
Figure 5
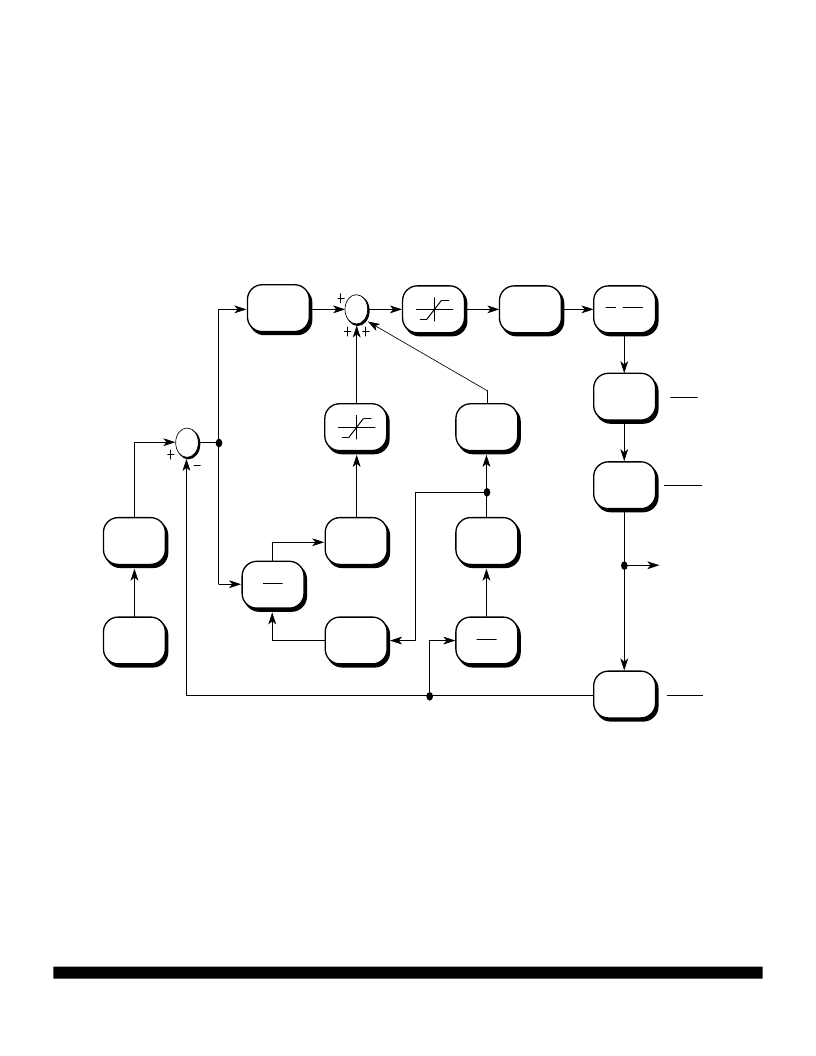
shows the PID controller and transfer functions of parasitic effects found in the system. All items
except the power stage, the motor, and the encoder, are implemented by the M68HC16 device.
Figure 5 System Block Diagram
The differentiator input is the encoder signal, not the error signal, for reasons discussed in the previous sec-
tion. The commanded input signal is not differentiated, and the stability of the system is not affected be-
cause the overall open-loop transfer function remains the same.
The integrator has several associated features that improve system damping. One is a software switch to
enable the integrator only when it is needed. Since this is a position servo, it is assumed that the integrator
is not required when the velocity magnitude increases above a specified threshold. This prevents an error
signal from being integrated over the entire duration of a change in position, which would require overshoot
to dump the error.
Figure 6
, which shows system response to a step function, illustrates the effectiveness
of this technique.
VELOCITY
z – 1
Tz
------------
1
2
1
2z
-----
+
=
PID SYSTEM BLOCK
P
I
– D
THRESHOLD
SWITCH
OUTPUT
POSITION
K2
G (S)
4 POINT
AVERAGER
PROFILER
2 POINT
AVERAGER
EXP(– STC)
z – 1
Tz
Tz
z – 1
OUT
IN
INTEGERATOR
LIMIT
PWM LIMIT
VOLTS
PWM
RADIANS
VOLT
COUNTS
RADIAN
K1
MOTOR
DIFFERENTIATOR
ENCODER POSITION
DSP
ACCUMULATOR
COMMANDED
POSITION
POSITION
ERROR
ON / OFF
CALCULATION
DELAY
INTEGRATOR
SAMPLE AND
HOLD
OUT
IN
AN1213
z – 1
Tz
I
S
相關PDF資料 |
PDF描述 |
|---|---|
| MC68HC24 | Port Replacement Unit (PRU) |
| MC68HC24D | Port Replacement Unit (PRU) |
| MC68HC705J | Microcontrollers |
| MC68HC705K1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
| MC68HC705KJ1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
相關代理商/技術參數 |
參數描述 |
|---|---|
| MC68HC16Z1CAG | 制造商:Freescale Semiconductor 功能描述: |
| MC68HC16Z1CAG16 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數據總線寬度:16 bit 最大時鐘頻率:24 MHz 程序存儲器大小:8 KB 數據 RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風格:SMD/SMT |
| MC68HC16Z1CAG16 | 制造商:Freescale Semiconductor 功能描述:IC16-BIT MICROCONTROLLER |
| MC68HC16Z1CAG20 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數據總線寬度:16 bit 最大時鐘頻率:24 MHz 程序存儲器大小:8 KB 數據 RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風格:SMD/SMT |
| MC68HC16Z1CAG20 | 制造商:Freescale Semiconductor 功能描述:Microcontroller |
發布緊急采購,3分鐘左右您將得到回復。