- 您現在的位置:買賣IC網 > PDF目錄371053 > MC68HC16Z1 (Motorola, Inc.) 16-Bit Modular Microcontroller(16位模塊化微控制器) PDF資料下載
參數資料
| 型號: | MC68HC16Z1 |
| 廠商: | Motorola, Inc. |
| 英文描述: | 16-Bit Modular Microcontroller(16位模塊化微控制器) |
| 中文描述: | 16位微控制器模塊(16位模塊化微控制器) |
| 文件頁數: | 7/20頁 |
| 文件大小: | 210K |
| 代理商: | MC68HC16Z1 |
AN1213/D
MOTOROLA
7
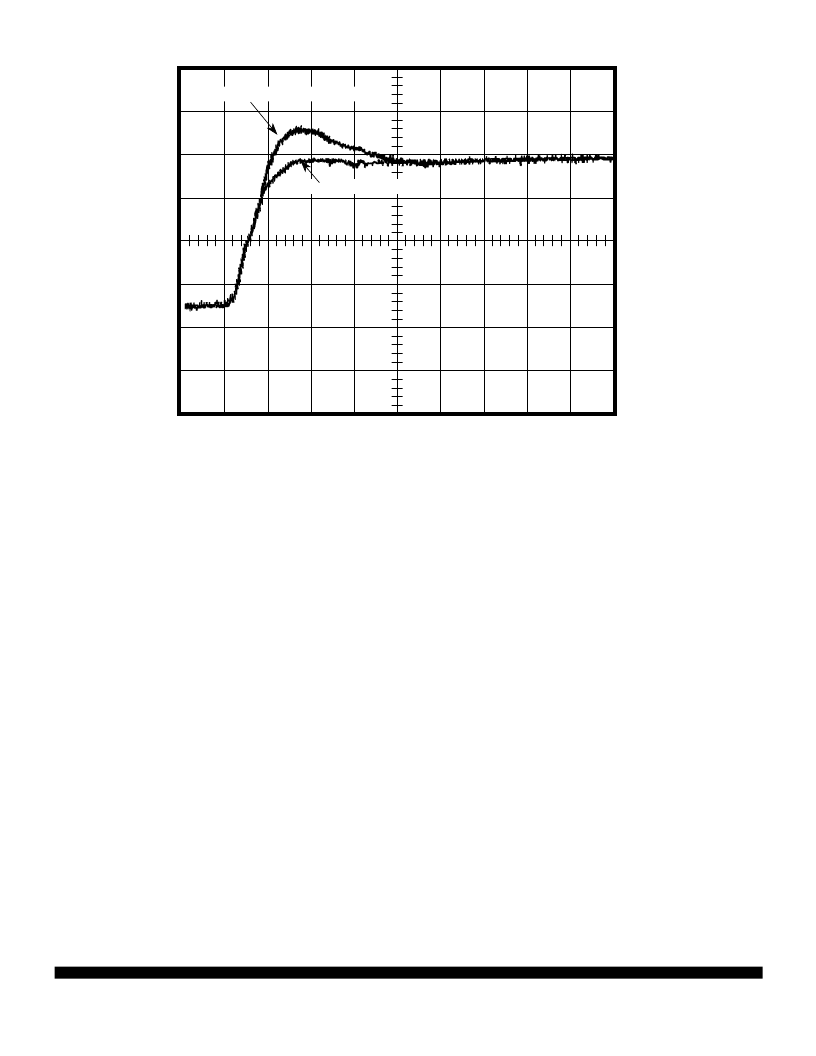
Figure 6 Step Response of System With and Without Integrator Switching
Integrator output magnitude is limited to mitigate the wind-up effect associated with PID integrators. The
limit is application-dependent, and should be set to the minimum value required to generate an output suf-
ficient to overcome any anticipated load resistance.
In theory, the sampling process is modeled as a series of impulse functions, which implies a PID filter cal-
culation time of zero. In reality, the amount of time required to execute a digital filter algorithm must be ac-
counted for, since it introduces phase lag into the system. Even though the lag is minuscule at the
frequencies of interest in this note, it is included for the sake of completeness, and is given by :
(EQ 7)
Where T
c
= Calculation time in seconds
The MC68HC16Z1 GPT module has two PWM ports, one of which is used as an output for the digital filter.
The PWM value is updated every sample period, and is latched until the following sample period. This sam-
ple and hold function introduces phase lag, which must be considered. There are several mathematical
models for a sample and hold; the one selected for this application is :
(EQ 8)
The commanded position input to the digital filter comes from another software routine called a profiler,
which is responsible for generating a series of positions corresponding to a specific velocity profile (a trap-
ezoidal profile is used for this application). Profiler design is beyond the scope of this note, but, because
profiler execution time rivals that of the digital filter, a new commanded position is not calculated at each
digital filter sampling interval (488
μ
s). While the CPU16 could easily perform the extra calculations, a re-
calculation interval equal to four times the sampling interval was judged sufficient. However, lowering the
profiler update rate creates another problem. The commanded position input now has a large step change
PWM STEP RESPONAN1213
WITH INTEGRATOR SWITCHING
WITHOUT INTEGRATOR SWITCHING
G
cd
2
( )
e
sTc
–
=
G
SH
s, z
(
)
z – 1
------------
Tz
=
相關PDF資料 |
PDF描述 |
|---|---|
| MC68HC24 | Port Replacement Unit (PRU) |
| MC68HC24D | Port Replacement Unit (PRU) |
| MC68HC705J | Microcontrollers |
| MC68HC705K1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
| MC68HC705KJ1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
相關代理商/技術參數 |
參數描述 |
|---|---|
| MC68HC16Z1CAG | 制造商:Freescale Semiconductor 功能描述: |
| MC68HC16Z1CAG16 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數據總線寬度:16 bit 最大時鐘頻率:24 MHz 程序存儲器大小:8 KB 數據 RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風格:SMD/SMT |
| MC68HC16Z1CAG16 | 制造商:Freescale Semiconductor 功能描述:IC16-BIT MICROCONTROLLER |
| MC68HC16Z1CAG20 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數據總線寬度:16 bit 最大時鐘頻率:24 MHz 程序存儲器大小:8 KB 數據 RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風格:SMD/SMT |
| MC68HC16Z1CAG20 | 制造商:Freescale Semiconductor 功能描述:Microcontroller |
發布緊急采購,3分鐘左右您將得到回復。