- 您現在的位置:買賣IC網 > PDF目錄371053 > MC68HC16Z1 (Motorola, Inc.) 16-Bit Modular Microcontroller(16位模塊化微控制器) PDF資料下載
參數資料
| 型號: | MC68HC16Z1 |
| 廠商: | Motorola, Inc. |
| 英文描述: | 16-Bit Modular Microcontroller(16位模塊化微控制器) |
| 中文描述: | 16位微控制器模塊(16位模塊化微控制器) |
| 文件頁數: | 8/20頁 |
| 文件大小: | 210K |
| 代理商: | MC68HC16Z1 |
MOTOROLA
8
AN1213/D
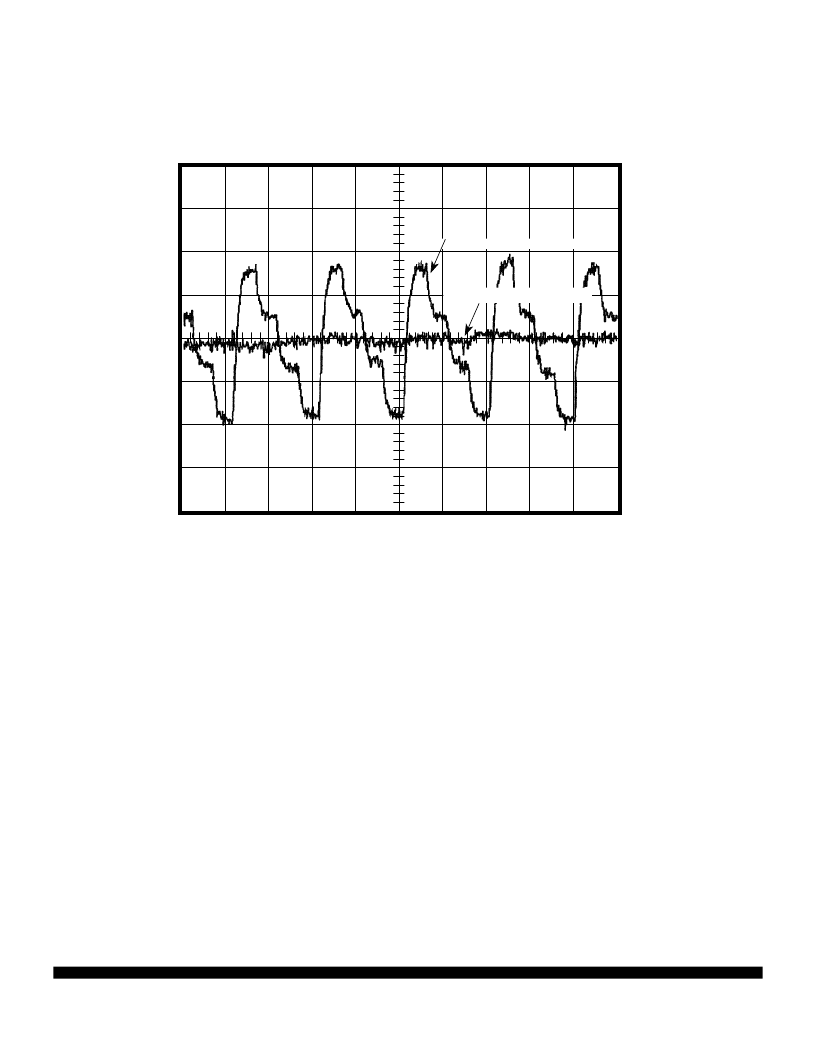
every fourth filter sample. This introduces a frequency component corresponding to profiler update rate at
the filter output, which is quite audible in the motor windings. To compensate, profiler outputs are shifted
through a 4-point averager running at the same frequency as the PID filter. The averager linearly interpo-
lates or smoothes profiler data at a 4X oversampling rate, which in turn eliminates motor noise. Filter output
waveforms shown in
Figure 7
illustrate the effectiveness of this technique.
Figure 7 PWM Output Ripple With and Without Profiler Filtration
SELECTING PID COEFFICIENTS
The following points should be taken into consideration when designing a servo.
To assure robust operation and speed, it is generally desirable to have as high a system frequency re-
sponse as possible.
To obtain adequate damping performance, phase margin (180 degrees minus the phase lag of the
open-loop transfer function evaluated at unity gain) should be as large as possible.
To make certain the system can tolerate a large change in gain (e.g., sagging power supply voltage or
drifting load parameters) without loss of stability, gain margin (difference in gain between the open-loop
transfer function gain evaluated at the point of –180 degrees phase shift, and unity gain) should be as
great as possible.
All of these conditions can be observed by generating magnitude and phase frequency plots of the open-
loop transfer function G(s,z)H(s,z). The open-loop function can be calculated by breaking the servo loop
diagram at a convenient point, then multiplying all individual transfer functions encountered around the loop
until arriving back at the break point. However, this procedure yields an equation that is a function of both
s and z. Fortunately, there is a mathematical relationship between z and s that allows representation of the
equation as a function of s alone.
PWM OUTPUTAN1213
WITHOUT PROFILER DATA FILTERING
WITH PROFILER DATA FILTERING
相關PDF資料 |
PDF描述 |
|---|---|
| MC68HC24 | Port Replacement Unit (PRU) |
| MC68HC24D | Port Replacement Unit (PRU) |
| MC68HC705J | Microcontrollers |
| MC68HC705K1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
| MC68HC705KJ1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
相關代理商/技術參數 |
參數描述 |
|---|---|
| MC68HC16Z1CAG | 制造商:Freescale Semiconductor 功能描述: |
| MC68HC16Z1CAG16 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數據總線寬度:16 bit 最大時鐘頻率:24 MHz 程序存儲器大小:8 KB 數據 RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風格:SMD/SMT |
| MC68HC16Z1CAG16 | 制造商:Freescale Semiconductor 功能描述:IC16-BIT MICROCONTROLLER |
| MC68HC16Z1CAG20 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數據總線寬度:16 bit 最大時鐘頻率:24 MHz 程序存儲器大小:8 KB 數據 RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風格:SMD/SMT |
| MC68HC16Z1CAG20 | 制造商:Freescale Semiconductor 功能描述:Microcontroller |
發布緊急采購,3分鐘左右您將得到回復。